

Mielenkiintoinen eikä ole monimutkainen robottijoka liikkuu tietyn värin esineen takana.
Kohteen sijainnin määrittämiseen käytetään älypuhelinkameraa, joka on asennettu robotin runkoon. Voit käyttää valmista rakentajaa, josta jo kirjoitin täällä. Tässä on luettelo mitä kirjoittaja tarvitsi. Älypuhelinta lukuun ottamatta tämän robotin hinta oli 60 dollaria
- Työläs UNO
- Älypuhelin Android-käyttöjärjestelmällä
- Robotti alusta
- kytkentäkaapelit
- H-silta tasavirtamoottoreille (tekijä käytti pololu TB6612FNG)
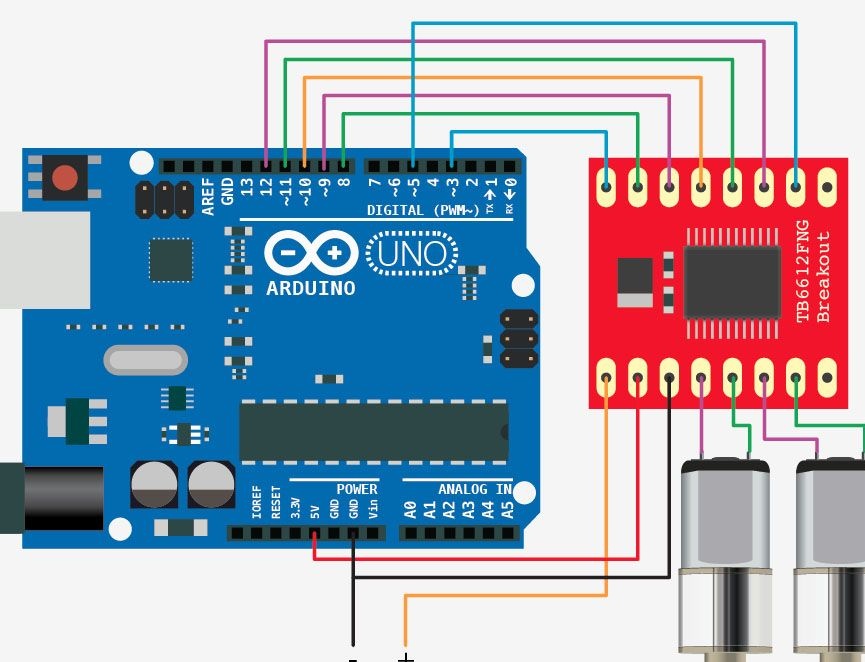
Kuvassa näkyy kuinka TB6612FNG ja Arduino Uno yhdistyvät
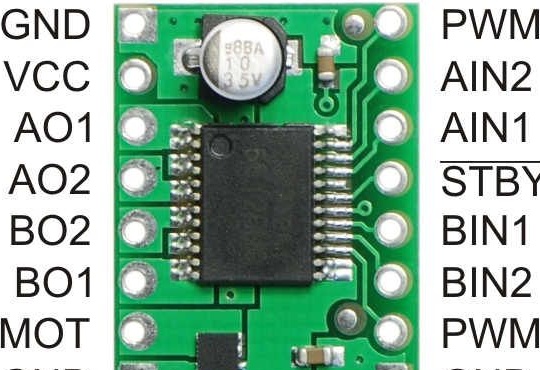
Kuljettajan päätelmät ja mistä he ovat vastuussa:
1) GND - Kytke se Arduinon GND-nastaisiin
2) VCC - Kuljettajan logiikan syöttöjännite. Kytke se Arduinon 5 V: n napaan.
3) A01 - lähtökosketin, joka on kytketty moottorin A positiiviseen napaan.
4) A02 - lähtökosketin, joka on kytketty moottorin A negatiiviseen napaan
5) B02 - lähtökosketin, joka on kytketty moottorin B negatiiviseen napaan.
6) B01 - lähtökosketin, joka on kytketty moottorin B positiiviseen napaan
7) VMOT- moottorien lähtöjännite. Kytke se akun positiiviseen napaan. (Moottorien virran saamiseksi)
8) GND- Liitä se akun miinusnapaan.
9) GND- Liitä se Arduinon GND-nastaan.
10) PWMB- PWM-moottorin kuljettajan nasta moottorin B nopeuden säätämiseksi. Liitä se mihin tahansa Arduinon PWM-nastaan ja määritä moottorin nopeusarvo välillä 0-255.
11 ja 12) ja BIN2 BIN1 - moottorin B moottoriohjaimen tuloliitännät, jotka määrittävät moottorin B pyörimissuunnan. Liitä se mihin tahansa kahteen Arduino-digitaalitappiin.
13) STBY- Kytke se mihin tahansa digitaalilähtöön. Korkealle tasolle asennettuna se sisältää ohjaimen
14 ja 15) AIN1 ja AIN2- moottorin ohjaimen tuloliitännät, jotka osoittavat moottorin A pyörimissuunnan. Liitä se mihin tahansa kahteen Arduino-digitaalitappiin.
16) PWMA-PWM-lähtö moottoriohjaimesta moottorin A nopeuden säätämiseksi. Kytke se mihin tahansa Arduinon PWM-nastaan ja määritä moottorin nopeusarvo välillä 0-255.
Bluetooth-moduuli HC-06
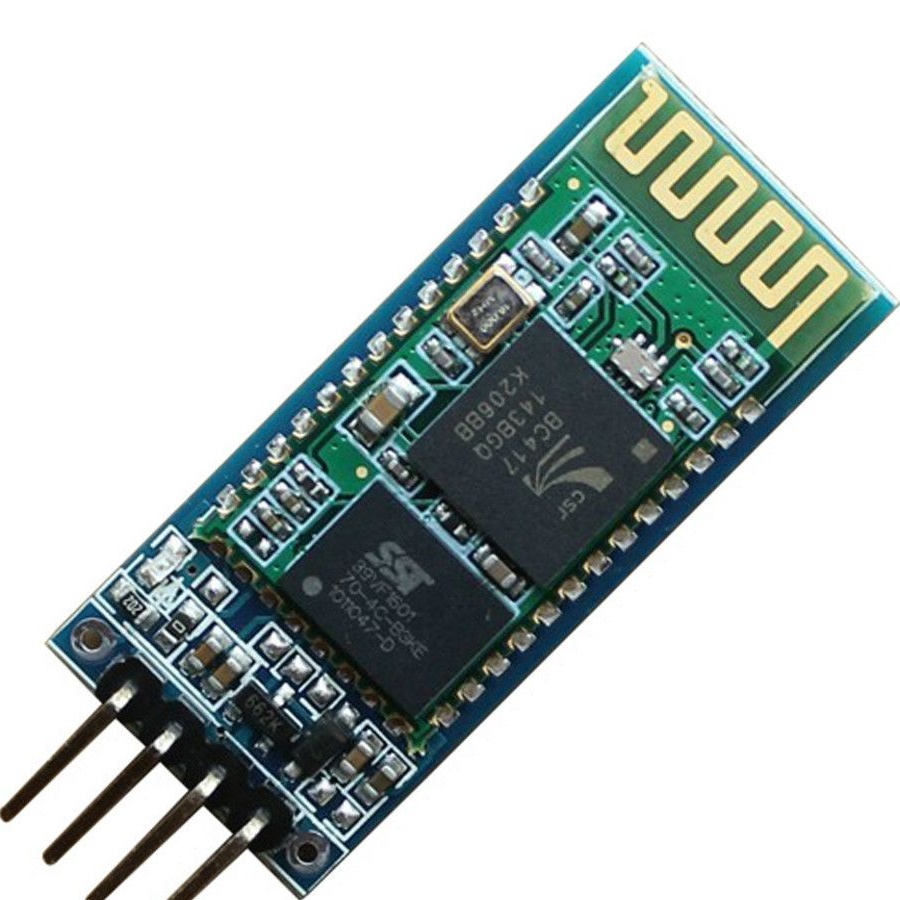
Aliexpress maksaa noin 6 dollaria
Kuinka kaikki toimii?
Tämä projekti käyttää Android-älypuhelinta erityissovelluksella, joka käsittelee tietoja kamerasta määrittääkseen missä punainen kohde on, laskee sen koordinaatit

bittikartta = Bitmap.createBitmap (mRgba.cols (), mRgba.rows (), Bitmap.Config.ARGB_8888); Utils.matToBitmap (mRgba, bittikartta);
int x = 0;
int y = 0;
int all_x = 0;
int all_y = 0;
kun taas (x <176) {
kun taas (y <144) {
int pixel = bitmap.getPixel (x, y);
int redValue = Väri.punainen (pikseli);
int blueValue = Väri.sininen (pikseli);
int greenValue = Väri.green (pikseli);
if (redValue> 200 && blueValue <70 && greenValue <70) {
pisteet ++;
all_x = kaikki_x + x;
all_y = all_y + y;
}
y ++;
}
x ++;
y = 0;
}
y = 0;
x = 0;
x_keskus = kaikki_x / pistettä;
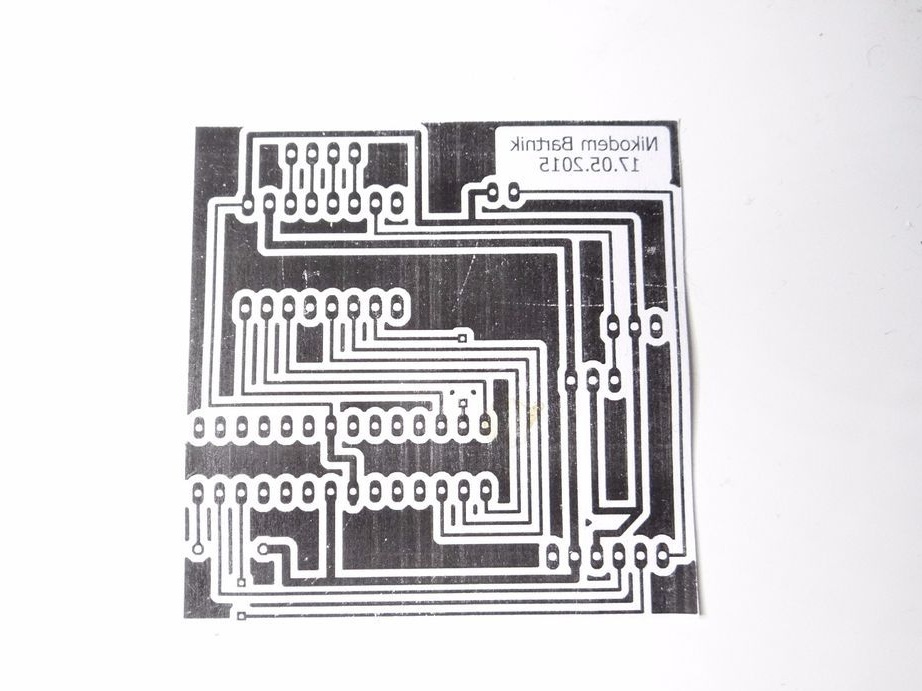
y_keskus = kaikki_ v / pisteet;Arkistossa kytkentäkaavio ja piirilevy robotille niille, jotka eivät halua ostaa Arduino UNO: ta
Mitä tarvitaan kokoamiseen:
- Kaikki edellä mainitut, atmega 8, 128 tai 328
- LED, väristä riippumatta
- 5v lineaarinen vakaaja (versiossa ilman Arduinoa)
- Tappiliittimet M ja F
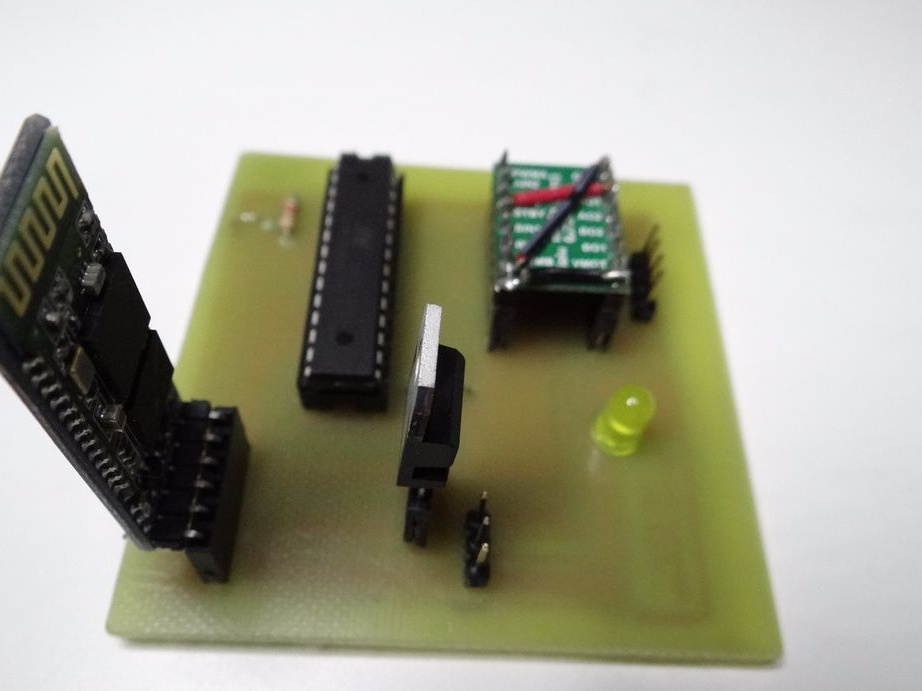
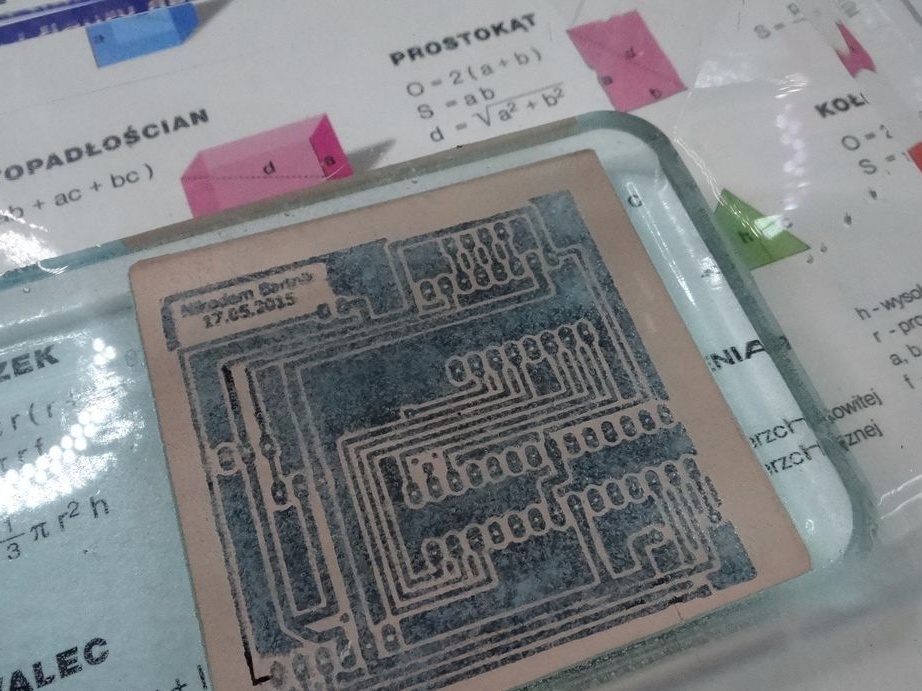
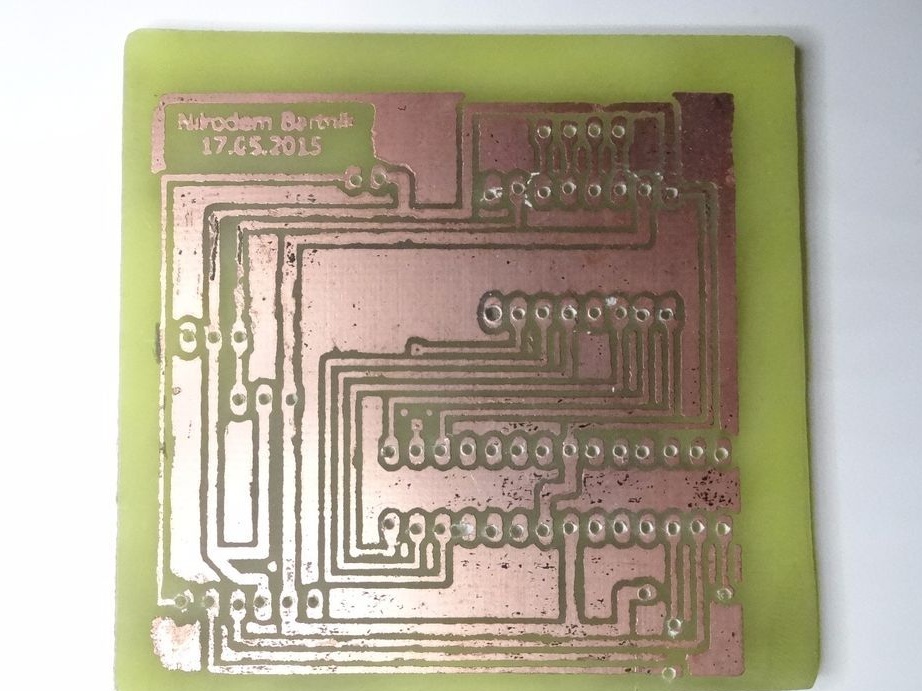
- Kaiverrettu ja porattu piirilevy (versio ilman Arduinoa)
- Pora, juotin.
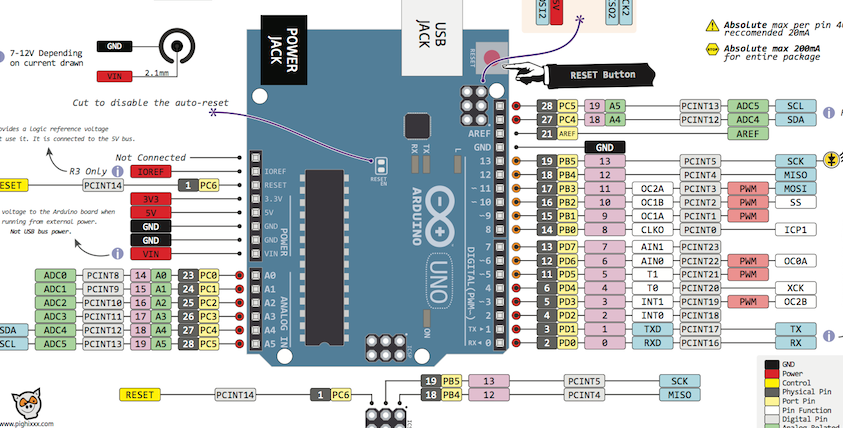
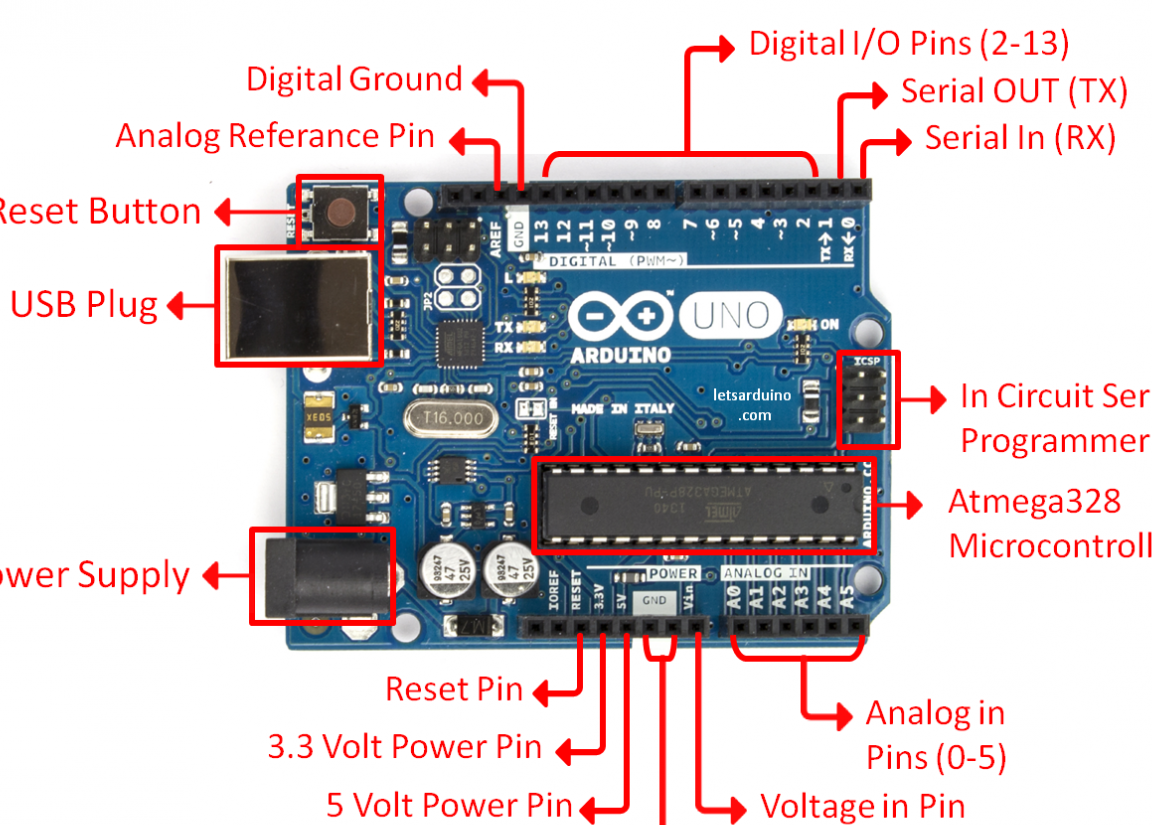
- Arduino Uno. Niille, jotka eivät tiedä, mitä johtopäätöksiä Arduino Uno tarvitaan, liitteenä olevan tiedoston kuvaus.
Ohjelma Arduinolle
Ohjelma Arduinolle on hyvin yksinkertainen. Tämän ohjelman arkistotunnus.
Ohjelma puhelimelle
Tähän arkistoon asennetaan puhelimen ohjelma, kuten tavallinen sovellus, ja tämän ohjelman lähdekoodi.Tuota se Android-studioon, kerää apk-tiedosto ja asenna se älypuhelimeesi.
Tämä ohjelma käyttää Bluetoothia vain datan lähettämiseen. Kirjaston kuvaus (openCV) löytyy Internetistä. Kirjailija teki painetun piirilevyn atmega 328: lle. Muista tämä, jos et käytä leipätaulua, vaan jaat allekirjoituksen: