


Vjerojatno jedan od osnovnih projekata na Arduino Ja sam senzor za parkiranje. No ovaj članak neće opisati stvaranje uobičajenih parking senzora, već parking senzora s ručnim podešavanjem kritične udaljenosti. Tijekom stvaranja ovog uređaja, povećati ćete svoje vještine u krugu i programiranju.
Glavne komponente:
• arduino Nano / Uno ploča
• ultrazvučni senzor udaljenosti HC-CR04
• 6 LED dioda
• 6 otpornika na 220 ohma
• 2 otpornika na 10 KOm
• 2 gumba sata
• piezo štitnik
• delirična ploča
• tata tata žice
• spužva za cipele (za kućište)
Iz alata:
• lemljenje željeza
• termo - ljepilo
Razmotrite algoritam uređaja
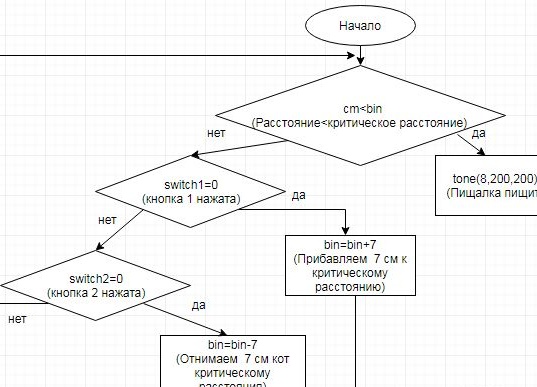
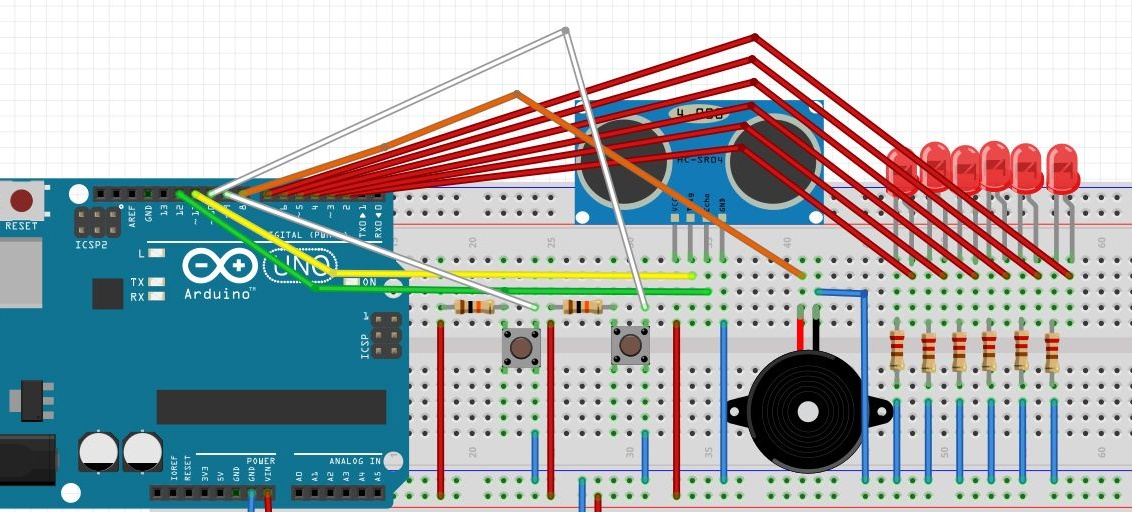
Nakon pregleda algoritma skupljamo shemu na dobrim pločama:
Budući da sam montirao krug u kućište, odlučeno je da napravim mini štitnike gumba i LED-ova.
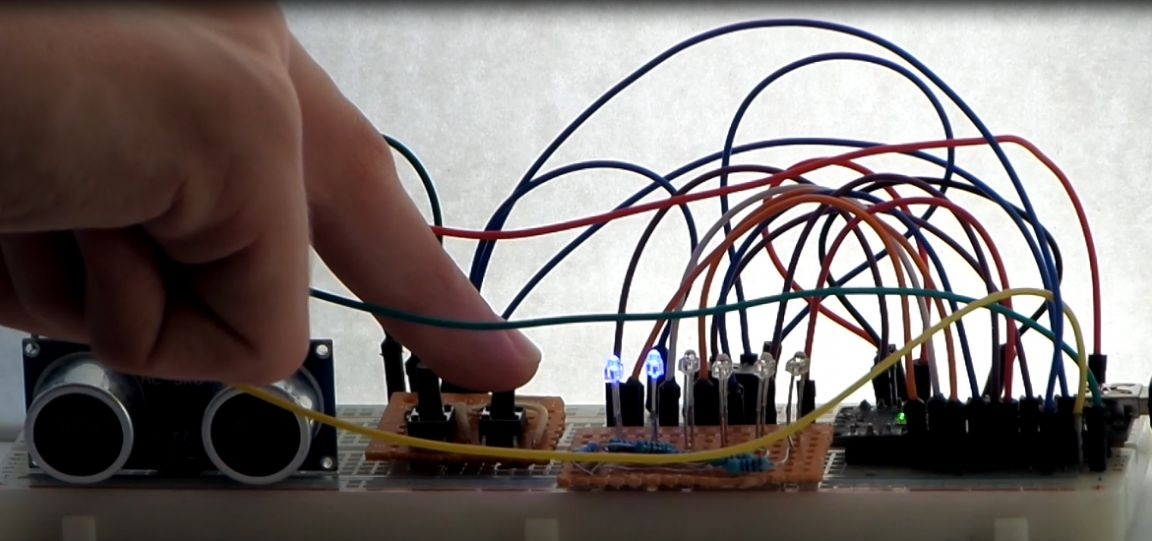
Kućište uređaja napravljeno je od kutije od spužve za cipele.
Izgleda kao uređaj iznutra.

Pogledajmo kod.
int switch1 = 9; // Gumb 1
int switch2 = 10; // Gumb 2
int pin = 2;
int bin = 40; // Početna kritična udaljenost u centimetrima !!!
int echoPin = 12; // Odjeljak za eho na HC-SR04 modulu
int trigPin = 11; // Trig pin na HC-SR04 modulu
int buz = 8; // Pin visokotonac
boolean lBut1 = NISKO;
boolean lBut2 = NISKO;
boolean cBut1 = NISKO;
boolean cBut2 = NISKO;
poništavanje postave () {
Serijski počet (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (sklopka1, ULAZ);
pinMode (sklopka 2, ULAZ);
pinMode (2, IZLAZ); // LED 1
pinMode (3, IZLAZ); // LED 2
pinMode (4, IZLAZ); // LED 3
pinMode (5, IZLAZ); // LED 4
pinMode (6, IZLAZ); // LED 5
pinMode (7, IZLAZ); // LED 6
pinMode (8, IZLAZ); // Škripati
}
boolean debounce (boolean zadnji)
{
booleova struja = digitalRead (switch1);
ako (zadnji! = trenutni)
{
kašnjenje (5);
current = digitalRead (sklopka1);
}
povratna struja;
}
boolean debounce2 (boolean last2)
{
booleova struja2 = digitalno čitanje (switch2);
ako je (last2! = current2)
{
kašnjenje (5);
current2 = digitalRead (switch2);
}
povratna struja2;
}
void petlja () {
int trajanje, cm;
digitalWrite (trigPin, LOW);
kašnjenjeMikrosekunde (2);
digitalWrite (trigPin, HIGH);
kašnjenjeMikrosekunde (10);
digitalWrite (trigPin, LOW);
trajanje = pulsIn (echoPin, HIGH);
cm = trajanje / 58;
Serijski otisak (cm);
Serijski.println ("cm");
kašnjenje (10);
cBut1 = debounce (lBut1);
if (lBut1 == LOW && cBut1 == VISOKO)
{
pin = pin-1;
kanta = kanta za smeće 7; // Broj 7 znači oduzimanje za 7 cm od kritične udaljenosti !!!
}
lBut1 = cBut1;
digitalWrite (pin, HIGH);
cBut2 = debounce2 (lBut2);
if (lBut2 == LOW && cBut2 == VISOKO)
{
pin = pin + 1;
kanta = kanta + 7; // Broj 7 znači zbrajanje 7 cm od kritične udaljenosti !!!
}
lBut2 = cBut2;
digitalWrite (pin, LOW);
ako je (cm 0)
{
ton (8.200.200);
kašnjenje (300);
}
drugo
{
noTone (8);
}
} Vrijednosti posude mogu se promijeniti u pogodnije za vas.
Kao rezultat toga, uređaj redovito obavlja svoje funkcije.

Ovaj će vam članak pomoći da napravite iste senzore za parkiranje bez mnogo napora.
Svima želim sreću u ponavljanju ovog uređaja. Nadam se da vam je moj vodič bio koristan za vas.